
For the Aerial Robotics course at EPFl, we programmed a Crazyflie drone to find and precisely land on a platform with the help of minimal sensory information. Additionally, we used sensor readings to design a robust algorithm that can avoid obstacles present in the environment.
- Date: Jan 2021
- Authors: Shadi Naguib, Gregoire Bergamo, Nikitas Papadopoulos
- Field of Study: Robotics, Electronics
- Context: EPFL MA1 Course Project
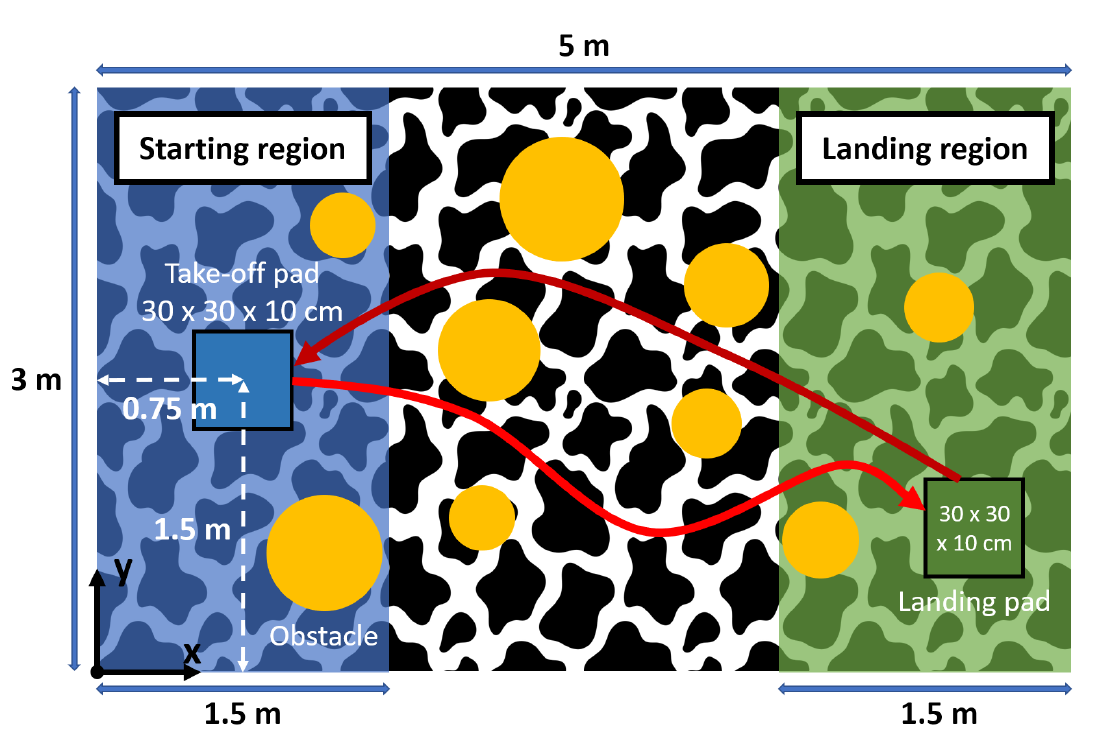
The arena for the final demonstration is shown in the figure above. The task we are required to complete in this arena is composed of multiple phases:
- The drone takes off from a take-off pad placed within the starting region.
- Thanks to the optic-flow sensor and a z-range finder the drone can track its movements and find the landing pad in the landing zone.
- Once the landing pad is found, the drone has to precisely land on it.
- Upon successful landing, the drone takes off, flies back and lands on the take-off pad.
- In the workspace, there can be a few obstacles of previously unknown dimensions which it can detect with the multiranger deck. Our developed algorithm makes the drone avoid any collisions.
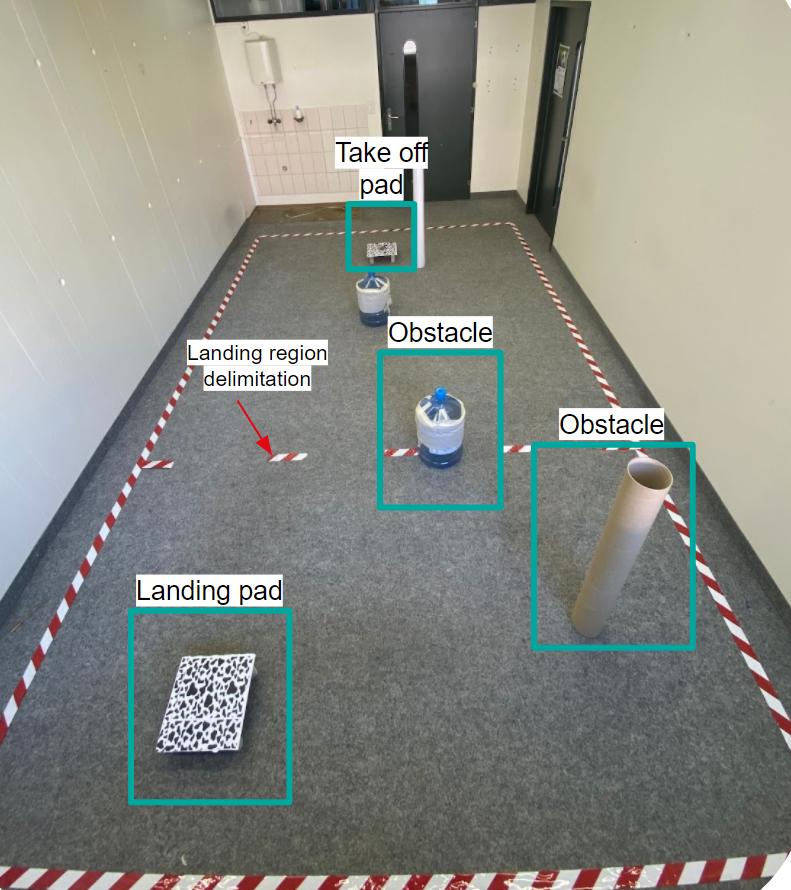
Room setup for demonstration
A video showing the result can be found below.
Additional Material
For any more information on the project, please don’t hesitate to contact me here, or check out the jupyter notebook below.

